[알고리즘] 자료구조 - 그래프
Table of Contents
그래프의 종류 #
- 그래프
- 노드 간의 네트워크 구조이다.
- 노드와 노드를 연결하는 간선(edge)를 모아 놓은 것이다.
- 그래프의 종류
- 방향성이 있는가?
- 무방향, 일방향, 양방향
- 모든 노드가 연결되어 있는가?
- 이것을 연결 그래프(connected graph)라고 한다.
- 가중치가 있는가?
- 방향성이 있는가?
그래프를 표현하는 방법 #
| 표현 방법 | 시간 복잡도 | 공간 복잡도 |
|---|---|---|
| 인접 리스트 | $O(V)$ | $O(E)$ |
| 인접 행렬 | $O(1)$ | $O(V^2)$ |
인접 리스트 #
- Adjacency list
(기준노드)배열 or 해시 테이블- +
(기준 노드에 연결된 노드들)배열 or 동적 가변 크기 배열 or 연결리스트
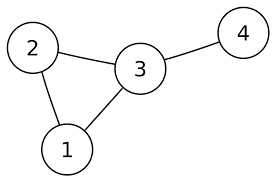
1: 2, 3
2: 1, 3
3: 1, 2, 4
4: 3
인접 행렬 #
- Adjacency matrix
- $n$ x $n$
bool행렬이다. - 만약
matrix[i][j]가true라면i에서j로의 간선이 있다는 의미이다.
- $n$ x $n$
| 0 1 2 3 4
----------------------------
0 | 0 0 0 0 0
1 | 0 0 1 1 0
2 | 0 1 0 1 0
3 | 0 1 1 0 1
4 | 0 0 0 1 0
그래프 탐색 알고리즘 #
깊이 우선 탐색(DFS) #
- Depth-first search
- 끝까지 가본 후에 갈 길이 없으면, 스택에서 꺼내어 다시 끝까지 간다.
- 모든 노드를 방문하고자 할 때 더 선호된다.
#include <iostream>
using namespace std;
const int NODE_MAX = 9;
const int START_NODE = 1;
// graph는 인접 리스트 형태이다.
vector<int> graph[NODE_MAX];
bool visited[NODE_MAX];
void DFS(int node)
{
// 해당 노드를 방문한다.
visited[node] = true;
cout << node << " ";
// 해당 노드와 연결된 노드들을 방문해간다.
for (int i = 0; i < graph[node].size(); i++)
{
int curNode = graph[node][i];
if (true == visited[curNode]) continue;
// 연결된 노드 중에 방문하지 않은 노드가 있다면 방문한다.
DFS(curNode);
}
}
int main()
{
//... 그래프 간선 정보 입력받기 ...
DFS(START_NODE);
}
너비 우선 탐색(BFS) #
- Breadth-first search
- 인접 노드를 모두 방문하고, 큐에서 꺼내어 다시 모두 방문한다.
- 최단 경로 혹은 임의의 경로를 찾고 싶을 때 더 빠르다.
#include <iostream>
#include <queue>
using namespace std;
const int NODE_MAX = 9;
const int START_NODE = 1;
// graph는 인접 리스트 형태이다.
vector<int> graph[NODE_MAX];
bool visited[NODE_MAX];
void BFS(int startNode)
{
queue<int> q; // 큐를 사용한다.
q.push(startNode); // 첫 노드
visited[startNode] = true;
while (false == q.empty())
{
// 큐에서 하나를 꺼내 방문한다.
int curNode = q.front();
q.pop();
cout << curNode << " ";
// 해당 노드와 연결된 노드들 중에 방문하지 않은 노드가 있다면 모두 큐에 넣는다.
for (int i = 0; i < graph[curNode].size(); i++)
{
int nextNode = graph[curNode][i];
if (true == visited[nextNode]) continue;
q.push(nextNode);
visited[nextNode] = true;
}
}
}
int main()
{
//... 그래프 간선 정보 입력받기 ...
BFS(START_NODE);
}
- (3) 양방향 탐색(Bidirectional search)
- 출발지와 도착지 사이에 최단 경로를 찾을 때 사용된다.
- 출발지와 도착지 두 노드에서 동시에 BFS를 한 뒤, 충돌하는 경우에 경로를 찾는다.
최단 경로 알고리즘 #
| 다익스트라(Dijkstra) | 플로이드 워셜(Floyd Warshall) | |
|---|---|---|
| 조건 | 음의 간선이 없어야 한다 | |
| 결과 | 하나의 노드에서 모든 노드로 가는 최단거리 | 모든 노드에서 모든 노드로 가는 최단거리 |
| 표현 | 인접 리스트 | 인접 행렬 |
| 방법 | A까지 거리 + A~B 거리 < B까지 거리 이면 갱신 |
A~B 최단거리 = min(A~B, A~K~B) |
| 시간 복잡도 | 우선순위 큐 사용 시, $O(E \log V)$ |
$O(V^3)$ |
다익스트라 #
#include <iostream>
#include <vector>
#include <queue>
using namespace std;
const int INF = 1e9;
const int NODE_MAX = 100001;
const int START_NODE = 1;
// graph는 인접 리스트 형태이며, cost정보가 추가되었다.
vector<pair<int, int>> graph[NODE_MAX]; // graph[from] = { to, cost }
int costs[NODE_MAX];
int nodeNum, edgeNum;
void Dijkstra(int startNode)
{
// 우선순위 큐를 사용하면 더 빠르다.
priority_queue<pair<int, int>> pq; // { -cost, from }
pq.push({ 0, startNode }); // 첫 노드
costs[startNode] = 0;
while(false == pq.empty())
{
// 가장 짧은 거리의 노드를 뺀다.
int from = pq.top().second;
int fromCost = -pq.top().first;
pq.pop();
if (costs[from] < fromCost) return;
// 해당 노드와 연결된 노드들 중에
for (int i = 0; i < graph[from].size(); i++)
{
int to = graph[from][i].first;
int toCost = graph[from][i].second;
if (fromCost + toCost >= costs[to]) continue; // A까지 총거리 + A~B 거리를, B까지의 총거리와 비교해서 더 짧다면
// 갱신하고 우선순위 큐에 넣는다.
costs[to] = fromCost + toCost;
pq.push({ -costs[to], to }); // -를 붙여서 값이 적은 순으로 우선순위가 높게 한다.
}
}
}
int main()
{
cin >> nodeNum >> edgeNum;
// (입력)
for (int i = 0; i < edgeNum; i++)
{
int from, to, cost;
cin >> from >> to >> cost;
graph[from].push_back({ to, cost });
}
// 최단 거리 테이블을 모두 무한으로 초기화
fill(costs, costs + NODE_MAX, INF);
Dijkstra(START_NODE);
// (출력)
for (int i = 1; i < nodeNum + 1; i++)
cout << costs[i] << " ";
}
플로이드 워셜 #
#include <iostream>
#include <vector>
using namespace std;
const int INF = 1e9;
const int NODE_MAX = 501;
// graph는 인접 행렬 형태이다.
int graph[NODE_MAX][NODE_MAX];
int nodeNum, edgeNum;
void FloydWarshall()
{
for (int k = 1; k < nodeNum + 1; k++)
for (int a = 1; a < nodeNum + 1; a++)
for (int b = 1; b < nodeNum + 1; b++)
graph[a][b] = min(graph[a][k] + graph[k][b], graph[a][b]);
}
int main()
{
cin >> nodeNum >> edgeNum;
// 최단 거리 테이블을 모두 무한으로 초기화
for (int i = 0; i < NODE_MAX; i++)
fill(graph[i], graph[i] + NODE_MAX, INF);
// 자기 자신에서 자기 자신으로 가는 비용은 0으로 초기화
for (int a = 1; a < nodeNum + 1; a++)
for (int b = 1; b < nodeNum + 1; b++)
if (a == b)
graph[a][b] = 0;
// (입력)
for (int i = 0; i < edgeNum; i++)
{
int from, to, cost;
cin >> from >> to >> cost;
graph[from][to] = cost;
}
FloydWarshall();
// (출력)
for (int i = 1; i < nodeNum + 1; i++)
{
for (int j = 1; j < nodeNum + 1; j++)
cout << graph[i][j] << " ";
cout << endl;
}
}
벨만-포드 #
- 다익스트라는 음의 간선을 처리할 수 없지만, 벨만-포드는 처리할 수 있다.
- 대신 시간 복잡도가 느리다.
- 따라서 음의 간선이 있다면 벨만-포드를,
- 음의 간선이 없다면 다익스트라를 사용한다.
| 다익스트라(Dijkstra) | 벨만-포드(Bellman-Ford) | |
|---|---|---|
| 조건 | 음의 간선이 없어야 한다 | 음의 간선도 처리할 수 있다 |
| 결과 | 하나의 노드에서 모든 노드로 가는 최단거리 | 하나의 노드에서 모든 노드로 가는 최단거리 |
| 방법 | 방문하지 않은 노드 중에서 최단 거리가 가장 가까운 노드만을 방문한다 | 매 단계마다 모든 간선을 전부 확인하면서 모든 노드간의 최단 거리를 구해나간다 |
| 시간 복잡도 | 우선순위 큐 사용 시, $O(E \log V)$ |
$O(|V||E|)$ |
#include <iostream>
#include <vector>
using namespace std;
struct Edge
{
int from;
int to;
int cost;
};
const int INF = 1e9;
const int NODE_MAX = 100001;
const int START_NODE = 1;
vector<Edge> edges;
int costs[NODE_MAX];
int nodeNum, edgeNum;
bool BellmanFord(int startNode)
{
// 시작 노드까지의 거리는 0
costs[startNode] = 0;
// 정점의 횟수만큼
for (int i = 0; i < nodeNum; i++)
{
// 모든 간선을 살펴본다.
for (int j = 0; j < edgeNum; j++)
{
int from = edges[j].from;
int to = edges[j].to;
int cost = edges[j].cost;
if (costs[from] == INF) continue;
if (costs[from] + cost >= costs[to]) continue;
// 새로운 값이 더 작으면 갱신
costs[to] = costs[from] + cost;
// n번째 라운드에서도 값이 갱신된다면 음수 순환이 존재한다.
if (i == nodeNum - 1) return true;
}
}
return false;
}
int main()
{
cin >> nodeNum >> edgeNum;
// (입력)
for (int i = 0; i < edgeNum; i++)
{
int from, to, cost;
cin >> from >> to >> cost;
edges.push_back({ from, to, cost });
}
// 최단 거리 테이블을 모두 무한으로 초기화
fill(costs, costs + NODE_MAX, INF);
bool negative_cycle = BellmanFord(START_NODE);
// (출력)
if (true == negative_cycle)
{
cout << -1 << endl;
return 0;
}
for (int i = 1; i < nodeNum + 1; i++)
cout << costs[i] << " ";
cout << endl;
}
A* 알고리즘 #
- 주어진 출발 노드에서부터 목표 노드까지 가는 최단 경로를 찾아내는 알고리즘이다.
- 출발 노드와 목적지 노드가 명확히 주어진다.
- 다익스트라와 비슷하나, 휴리스틱(Heuristics) 이라는 추정값을 이용해서 최단거리를 구해나간다는 점이 다르다.
-
각 단계에서 노드를 평가하는 방법은 다음과 같다.
- $ f(n) = g(n) + h(n)$
- $g(n)$ : 출발 노드에서부터 노드 $n$까지의 경비값
- $h(n)$ : 노드 $n$에서부터 목표 노드까지의 추정된 경비값
-
그리드 맵에서의 휴리스틱 $h(n)$은 다음과 같이 구할 수 있다.
- 4방향 이동 : 맨하튼 거리
- 8방향 이동 : Diagonal 거리
- 어느 방향이든 이동 : 유클리드 거리
- 참고 사이트
- 그리드 맵에서 8방향 이동 시 A* 알고리즘으로 최단 경로를 구하는 코드
#include <iostream>
#include <iomanip>
#include <vector>
#include <queue>
using namespace std;
const int INF = 1e9;
const int MAX = 100;
struct Pos
{
int x, y;
};
struct NodeData
{
int g, h;
Pos prev; // 이전 노드 값 -> 경로 추적을 위해 저장
NodeData()
{
g = INF;
h = INF;
prev = {0, 0};
}
int GetF()
{
return g + h;
}
};
const int DIR_LENGTH = 8;
const Pos DIR[DIR_LENGTH] = {{0, -1}, {1, -1}, {1, 0}, {1, 1}, {0, 1}, {-1, 1}, {-1, 0}, {-1, -1}};
const int DISTANCE = 10;
const int DIAGONAL_DISTANCE = 14;
bool map[MAX][MAX];
int ySize, xSize;
NodeData result[MAX][MAX];
int GetDistance(Pos from, Pos to)
{
int xDis = abs(from.x - to.x);
int yDis = abs(from.y - to.y);
int min = (xDis < yDis) ? xDis : yDis;
int max = (xDis < yDis) ? yDis : xDis;
// 8방향 이동 : Diagonal 거리를 구한다.
// x와 y의 갭(max - min)만큼 평행으로 이동(DISTANCE)하고,
// 짧은 쪽(min)으로 대각선으로 이동(DIAGONAL_DISTANCE)한다.
return (max - min) * DISTANCE + min * DIAGONAL_DISTANCE;
}
void AStar(Pos start, Pos des)
{
// 시작노드에서 시작노드까지의 거리 0
// 시작노드에서 목적지노드까지의 거리 H
result[start.x][start.y].g = 0;
result[start.x][start.y].h = GetDistance(start, des);
result[start.x][start.y].prev = start;
priority_queue<pair<int, pair<int, int>>> pq; // { 우선순위의 기준이 되는 F값, { x, y } }
pq.push({ -result[start.x][start.y].GetF(), { start.x, start.y } });
while (!pq.empty())
{
Pos cur = { pq.top().second.first, pq.top().second.second };
int curF = -pq.top().first;
pq.pop();
// 목적지에 도달했다면 끝내기
if (cur.x == des.x && cur.y == des.y) break;
// 기존의 F값보다 < 현재 노드의 F값이 더 크면 (더 좋은(짧은) 거리값이 아니면) 필요 없다
if (result[cur.x][cur.y].GetF() < curF) continue;
for (int i = 0; i < DIR_LENGTH; ++i)
{
Pos next = { cur.x + DIR[i].x, cur.y + DIR[i].y };
if (next.x < 0 || next.y < 0 || ySize <= next.x || xSize <= next.y) continue;
if (map[next.x][next.y] == INF) continue;
// 노드 next의 G값 = 이전노드 cur의 G값 + 이전노드와 next의 거리
// 노드 next의 F값 = G값 + 목적지노드와 next의 거리(H)
int nextG = result[cur.x][cur.y].g + GetDistance(cur, next);
int nextH = GetDistance(next, des);
if (result[next.x][next.y].GetF() < nextG + nextH) continue;
result[next.x][next.y].g = nextG;
result[next.x][next.y].h = nextH;
result[next.x][next.y].prev = cur;
pq.push({ -result[next.x][next.y].GetF(), { next.x, next.y } });
}
}
}
void PrintTable(Pos from, Pos to)
{
printf("시작 노드 : {%d, %d}, 목적지 노드 : {%d, %d}\n", from.x, from.y, to.x, to.y);
printf("형식 : G + H = F (이전노드x, 이전노드y)\n");
for (int i = 0; i < ySize; i++)
{
for (int j = 0; j < xSize; j++)
{
if (result[i][j].g != INF)
{
printf("%2d+%2d=%2d(%d, %d) ",
result[i][j].g, result[i][j].h, result[i][j].GetF(),
result[i][j].prev.x, result[i][j].prev.y);
}
else
{
cout << setw(15) << "";
}
}
cout << endl;
}
cout << endl;
}
void PrintPath(Pos from, Pos to)
{
// 경로 출력을 위해 목적지부터 되돌아가며 path에 경로 넣기
vector<Pos> path;
path.push_back(to);
Pos cur = result[to.x][to.y].prev;
while (1)
{
path.push_back(cur);
if (cur.x == from.x && cur.y == from.y) break;
cur = result[cur.x][cur.y].prev;
}
cout << "이동경로 : ";
for (int i = path.size() - 1; i >= 0; i--)
{
cout << "{" << path[i].x << ", " << path[i].y << "}";
if (i != 0) cout << " > ";
}
cout << endl;
}
int main()
{
cin >> xSize >> ySize;
// (입력)
for (int i = 0; i < ySize; i++)
for (int j = 0; j < xSize; j++)
cin >> map[i][j];
Pos start = { 0, 0 };
Pos des = { xSize - 1, ySize - 1 };
AStar(start, des);
// (출력)
PrintTable(start, des);
PrintPath(start, des);
}
위상 정렬 #
| 위상 정렬(Topology sort) | |
|---|---|
| 조건 | 사이클이 없는 방향 그래프 |
| 설명 | 방향성에 거스르지 않고 순서대로 정렬하기 인접 리스트를 사용한다 |
| 시간 복잡도 | 모든 노드와 간선을 확인하므로, $O(V + E)$이다 |
#include <iostream>
#include <queue>
using namespace std;
// BFS를 사용한 방법이다.
const int NODE_MAX = 100001;
// graph는 인접 리스트 형태이다.
vector<int> graph[NODE_MAX];
// 진입차수는 해당 노드로 도착하는 간선의 개수이다.
int indegree[NODE_MAX];
int nodeNum, edgeNum;
vector<int> result;
void TopologySort()
{
// 큐를 사용한다.
queue<int> q;
// 진입차수가 0인 노드를 모두 큐에 넣는다.
for (int i = 1; i < nodeNum + 1; i++)
if (indegree[i] == 0)
q.push(i);
// 큐가 빌 때까지 계속한다.
while(false == q.empty())
{
// 큐에서 노드를 하나 꺼낸다. 꺼낸 순서가 정렬 결과이다.
int from = q.front();
q.pop();
result.push_back(from);
// 꺼낸 노드와 연결된 노드의 진입차수를 1씩 감소시킨다.
for (int i = 0; i < graph[from].size(); i++)
{
int to = graph[from][i];
indegree[to]--;
// 진입차수가 0이 되면 큐에 넣는다.
if (indegree[to] == 0)
q.push(to);
}
}
}
int main()
{
cin >> nodeNum >> edgeNum;
// (입력)
for (int i = 0; i < edgeNum; i++)
{
int from, to;
cin >> from >> to;
graph[from].push_back(to);
// 진입 차수 설정하기
indegree[to] += 1;
}
TopologySort();
// (출력)
for (int i = 0; i < result.size(); i++)
cout << result[i] << ' ';
}
최소 비용 신장트리 알고리즘 #
- 신장 트리(Spanning tree)
- 모든 노드를 포함하면서, 사이클이 존재하지 않는 부분 그래프.
- 최소 비용 신장트리(MST; Minimum Spanning Tree) 알고리즘
- 최소한의 비용으로 모든 노드를 연결하는 알고리즘.
크루스칼 알고리즘 #
| 크루스칼 알고리즘(Kruskal Algorithm) | |
|---|---|
| 조건 | 가중치가 있는 무방향 그래프 |
| 설명 | 그리디를 사용하여 최소 비용 간선 순으로 사이클이 발생하는지 체크한다 |
| 시간 복잡도 | 간선 정렬 작업이 제일 오래걸리는 부분이므로, $O(E \log E)$이다 |
#include <iostream>
using namespace std;
struct EdgeData
{
int a;
int b;
int cost;
// 비용이 작은 것이 앞으로 간다.
bool operator<(EdgeData b)
{
return cost < b.cost;
}
};
const int NODE_MAX = 100001;
vector<EdgeData> edges;
int parent[NODE_MAX];
int nodeNum, edgeNum, result = 0;
int FindParent(int idx)
{
if (idx != parent[idx])
parent[idx] = FindParent(parent[idx]);
return parent[idx];
}
void UnionParent(int a, int b)
{
a = FindParent(a);
b = FindParent(b);
if (a > b) parent[a] = parent[b];
else parent[b] = parent[a];
}
void Kruskal()
{
// 부모 테이블을 자기 자신으로 초기화
for (int i = 1; i < nodeNum + 1; i++)
parent[i] = i;
// 간선을 비용에 따라 오름차순으로 정렬한다. E log E의 시간 복잡도가 걸린다.
sort(edges.begin(), edges.end());
for (int i = 0; i < edges.size(); i++)
{
int a = edges[i].a;
int b = edges[i].b;
// 연결된 두 노드의 부모노드가 같다면 사이클이므로 제외하고,
if (FindParent(a) == FindParent(b)) continue;
// 다르다면 포함시킨다 == Union한다.
UnionParent(a, b);
result += edges[i].cost;
}
}
int main()
{
cin >> nodeNum >> edgeNum;
// (입력)
for (int i = 0; i < edgeNum; i++)
{
int a, b, cost;
cin >> a >> b >> cost;
edges.push_back({ a, b, cost });
}
Kruskal();
// (출력)
cout << result << endl;
}